White paper
Printing Strain Gauges on TPU laminated on a Glove for Remote Hand Control
Robotic hands are useful in many fields. They can be applied to advanced prosthetic devices, hazardous environments, and augmented reality applications. This project demonstrates the process of printing strain gauges on TPU, laminating them to a glove, and using them to control a robotic hand.

- DuPont™ Intexar™ PE874 Stretchable Silver Conductor Ink
- Voltera conductor 2 silver ink (replaced by Conductor 3)
- T4 Solder Paste Sn42Bi57.6Ag0.4
- Thermoplastic polyurethane (TPU) sheet
- Arduino breakout board templates
Project Overview
Purpose
The purpose of this project was to demonstrate how we used NOVA and V-One to create a wearable device — a glove equipped with printed strain gauges — to transmit signals to a robotic hand, enabling the robotic hand to mimic human hand movements.
Design
We divided the design into three main parts:
- The glove with strain gauges
- The 3D printed robotic hand
- The breakout PCB boards

The Arduino Uno takes data from each strain gauge printed on the glove, and the nRF24L01+ transmitter module sends data to the receiver module. Upon receiving the data, the other Arduino Uno sends signals to the servos, which manipulate the robotic fingers.
Desired outcome
Once the two controllers are connected to power, the robotic hand is able to mimic the movement of the human hand wearing the glove. As the hand moves and stretches the strain gauges on the glove, the strain gauges remain conductive and exhibit a measurable change in resistance.
Functionality
The fingers on the robotic hand could bend up to 60°, allowing the hand to grab and grip a medium sized object, such as a mug. Depending on its intended use, more components could be added to increase the glove’s complexity. For example, adding gyro sensors could allow for features like orientation detection while performing tasks in variable terrains.
Printing PCBs and wearable strain gauges
The glove with strain gauges
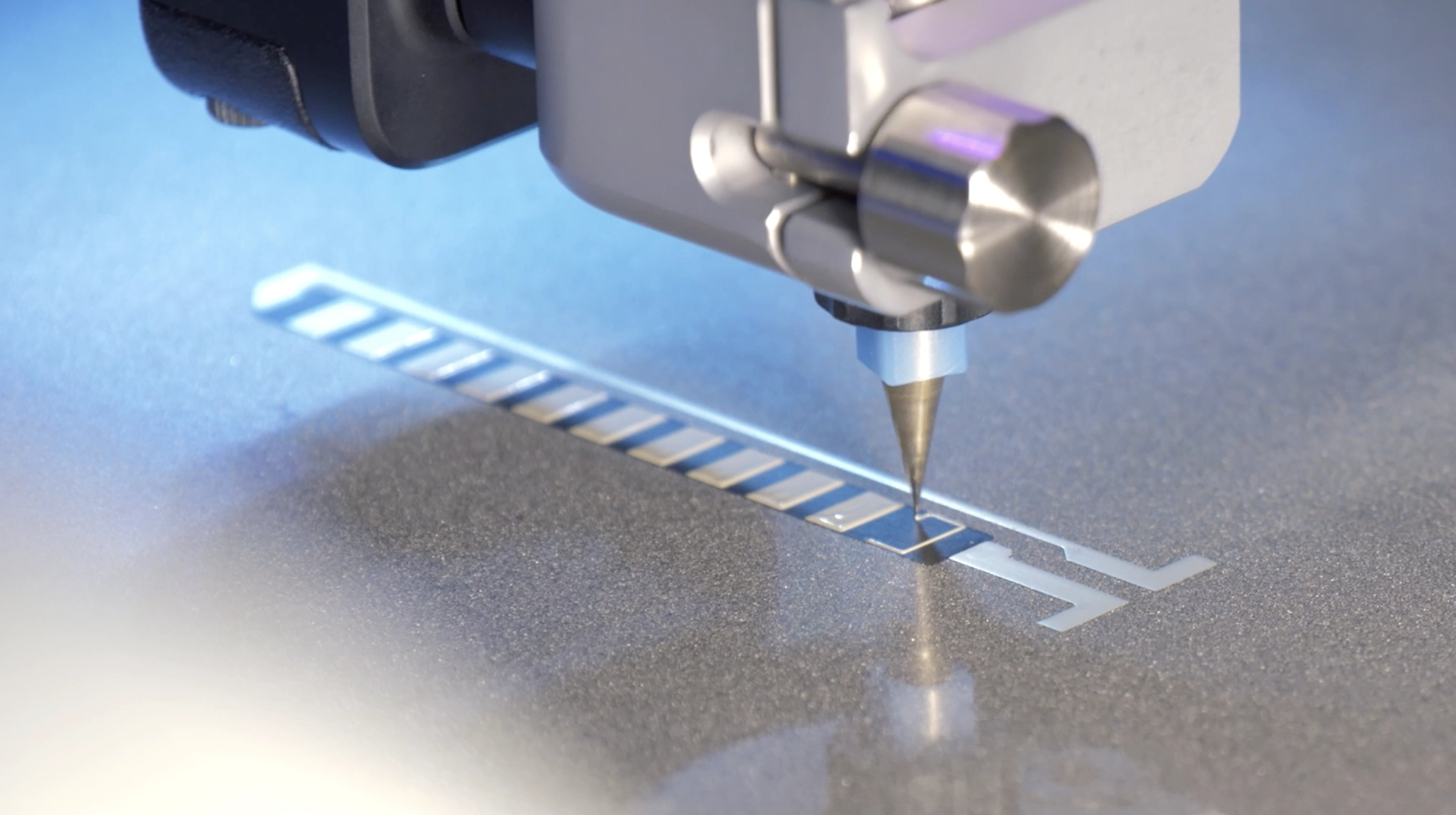
We needed a wearable device to encase a hand, receive pressure feedback, and send signals to the controller. To meet this requirement, we printed conductive traces on a sheet of TPU, covered the traces with another layer of TPU for protection, and laminated the layers onto an off-the-shelf gardening glove.
| Ink | DuPont™ Intexar™ PE874 Stretchable Silver Conductor Ink |
| Substrate | TPU |
| Nozzle Type | Subrex 150 µm micro precision nozzle |
| Probe Pitch | 5 mm |
| Cure Time and Temperature | 12 minute at 130°C |



Depending on finger and hand size, the dimensions of the traces can vary. In our case, we designed the traces to be proportional to the purchased glove, making the circuits for the thumb and pinky finger shorter than those for the other fingers. From left to right, the traces correspond to the pinky, ring, middle, index, and thumb, respectively.
The traces form a meander that runs up and down the length of the fingers, creating a longer trace length to make the strain gauge more sensitive to bending. We bonded the wires to the conductive pads at the bottom of each circuit using a conductive adhesive. These wires connect the pads to the transmitter board.
To mount the transmitter board, we 3D printed a wrist wrap base using PLA filament. After mounting it to the base, we threaded a band through the narrow openings on either side of the base, securing the board on the forearm.


The 3D printed robotic hand
Apart from the glove with strain gauges, we also needed a robotic hand to mimic and execute the movements of the human hand. We 3D printed the hand with flexible fingers using a readily available .stl file, with PLA and TPU filaments for different parts:
- TPU Filament: Used for the joints and tendons of the hand
- PLA Filament: Used for the hand and the base

We also designed and 3D printed a base for the hand that houses five servo motors. The servo motors were connected to wires that were run internally as “tendons” through the fingers.

The breakout PCB boards
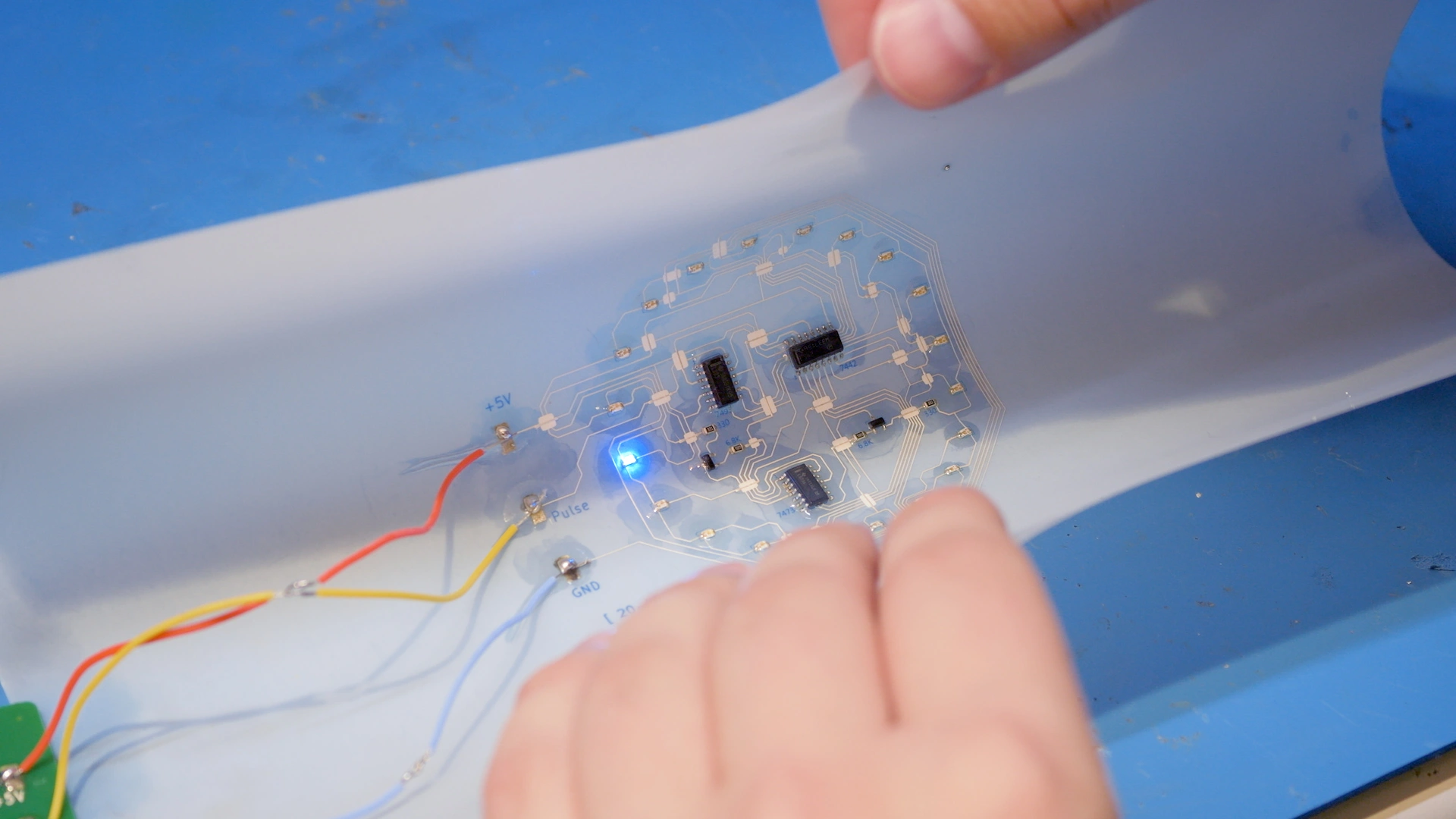
A crucial component of this project was its controllers: two breakout boards mounted on Arduino Unos. The breakout boards were customized to act as transmitter and receiver, respectively.

We used the Voltera V-One PCB printer to drill vias on the boards, and printed the traces using Voltera Conductor 2 silver ink (discontinued, replaced by Conductor 3). We then dispensed solder paste and mounted a series of components including resistors, integrated circuits, batteries, and nRF24L01+ 2.4 GHz transceiver modules.

As a final step, we connected the wires, starting with the pinky finger connecting to the leftmost port, followed by the other fingers in sequence. The robotic hand is now able to function as intended.
Challenges and advice for printing stretchable circuits
Although the DuPont™ Intexar™ PE874 Stretchable Silver Conductor Ink is stretchable, it required some trial and error to allow the gauges to fully stretch without losing conductivity, while still providing a measurable change in resistance.
We found that printing thicker traces (about 1 mm in line width) worked better and offered more consistent continuity while stretching. We recommend decreasing the print speed, increasing print height, or using a larger nozzle for better results.
Conclusion
Through this project, we developed a wearable device that controls a robotic hand through printed strain gauges on a glove. This hand, capable of mimicking human movements, highlights its potential application in fields such as prosthetics, where robotic hands enable amputees or those with limb differences to control artificial limbs intuitively.
In addition, robotic hands can be used in hazardous environment operations, such as handling hazardous materials, performing tasks in extreme temperatures, or in conditions with toxic exposure. Operators can use this technology to minimize the risk for humans, while still maintaining control.
In virtual reality (VR) and augmented reality (AR) applications, such as training simulations, gaming, and special educational tools, using robotic hands allows for immersive experience. As we continue to explore the possibilities of wearable electronics, we invite you to view the other projects we’ve completed.
Printing multilayer flexible, stretchable, and conformable electronics?
NOVA’s Plan feature makes it easy.